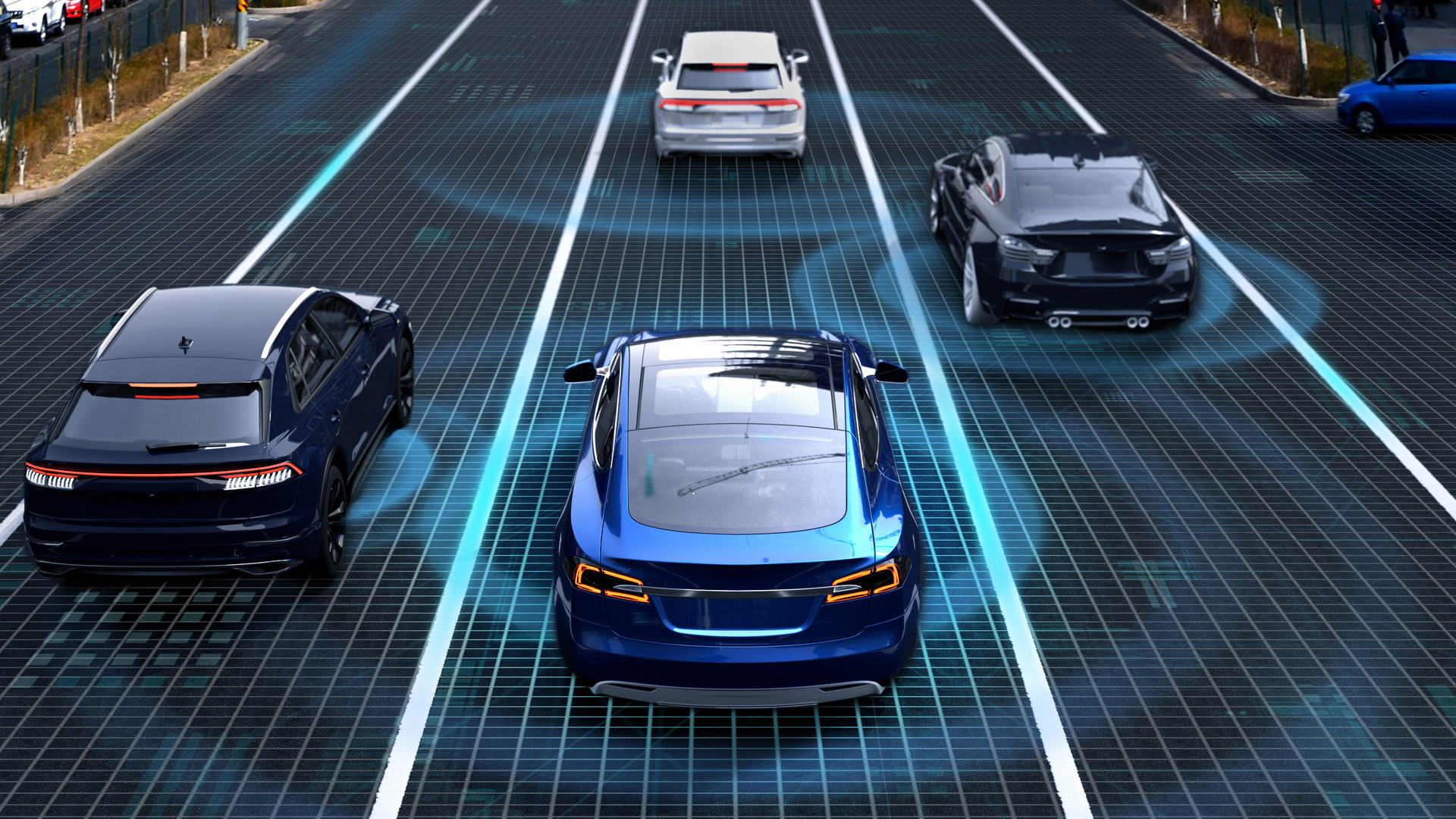
隨著系統規模與複雜性不斷提升,工程師同時也面臨著能效、電磁相容性(EMC)及可靠性的嚴苛挑戰。對於系統架構師與嵌入式硬體工程師而言,這些設計挑戰已無法單獨解決,而需從整體架構著手。
通訊完整性、負載控制與低功耗運作密不可分,因此采取整合性思維成為關鍵。本篇文章將針對六大核心設計要素進行深入探討:
1. CAN FD:速度與訊號完整性的取舍
隨著CAN FD(靈活資料速率)問世,資料速率已可達5 Mbps以上,顯著提升ECU間的通訊效率並降低延遲,尤其適用於車身域功能。但高速傳輸也帶來信號完整性問題,如反射、振鈴與電磁幹擾(EMI),特別在長距離或多節點架構中更加嚴重。
新一代CAN收發器導入信號增強技術與嚴格的時序對稱設計,有效抑制訊號失真,部分元件更支援高達8 Mbps的傳輸速率,滿足未來需求並與既有系統相容。
2. EMC 合規性不容妥協
歐盟IBEE/FTZ-Zwickau及IEC62228-3等標准對EMC表現要求嚴格,符合標准的收發器需內建振鈴抑制功能,避免使用龐大的共模電感器件,簡化BOM與布局設計,加速認證流程。
3. 選擇性喚醒:電動車的標配功能
選擇性喚醒技術透過特定CAN遠端幀,只喚醒目標ECU,其他保持低功耗待機狀態。此方式可顯著降低靜態功耗與匯流排負載,尤其適用於長時間閑置的車門、照明等車身模組,並符合OEM的節能策略與新興法規。
4. 超越基本開關功能的負載控制
保護機能如反接保護、接地遺失偵測與瞬態抗擾能力已成標配。整合式解決方案有助於降低元件數、簡化設計並提升整體系統穩定性與壽命。
5. 整合式馬達驅動器提升智能致動
支援微步進、具AEC-Q100認證,並能直接連接標准MCU通訊協議,提供平穩動作、低噪音與更精確的轉矩控制,亦提升安全性與診斷能力,實現預防性維護。
6. 從系統層級思考設計整合
例如,將訊號優化的CAN收發器搭配能承受感性負載的高側開關,即可在幹擾發生時維持通訊穩定;結合內建診斷的智慧馬達驅動器與即時監控開關模組,可實現更高層級的系統感知與故障應對能力。
在分區控制架構中,每個區域管理數十個致動器與感測器,系統級整合不僅提升單區效能,也強化整車平臺的通訊一致性與安全控制。
邁向新世代車身電子架構的藍圖
打造現代車身控制網絡,是一場平衡設計空間、資料速率、功耗與法規要求的工程挑戰。唯有放眼全局,才能實現兼具彈性、穩定與高效的設計。
透過策略性整合各項元件特性——從CAN FD訊號增強、選擇性喚醒,到智慧驅動能力——我們能構建出一個為未來車輛准備的車身控制藍圖,一個不再混亂,而是條理分明的系統架構。
——來源:https://www.eetasia.com